
近日,机械与电子工程学院苑进教授团队在《computers and electronics in agriculture》发表题为“3msp2: sequential picking planning for multi-fruit congregated tomato harvesting in multi-clusters environment based on multi-views”的最新研究成果。机电学院博士研究生戴念祖为第一作者,苑进教授为文章唯一通讯作者,刘学美教授、方家明博士参与课题研究,我校为第一通讯单位。
作为世界上最重要的水果和蔬菜之一,番茄在全球蔬菜贸易市场中占有重要地位,每年都需要大量劳动力进行采收作业。然而,随着人口老龄化,劳动力短缺现象逐渐加剧,导致在采收季节难以招募到足够的工人。因此,亟需开发具有智能感知和选择性收获能力的采摘机器人,以解决收获季节劳动力不足的问题,降低收获成本,提高收获效率。对于采摘机器人而言,高效、稳健和高成功率的抓取策略包括最佳采摘姿势和最佳采摘序列。然而,现有的这些采摘姿态估计方法和采摘序列规划方法并不能直接用于大果丛生番茄的采摘,因为使用这些方法做出决策的采摘机器人对特定环境下采摘任务的鲁棒性较差,它们难以在丛生、无序和复杂的环境中自动确定采摘果实目标。特别是对于不同类型和采收方式的番茄植株,其生长状态具有不确定性,空间相对位置和空间姿态也不尽相同。
针对以上技术难题,山东农业大学苑进教授团队提出了一种新颖的番茄顺序采摘规划方法,称为3msp2(3m 表示多视角、多集群和多果实的应用场景,sp2 表示顺序采摘规划),用于多集群环境下的多果实集中采摘,以提高机器人采摘效率并减少末端执行器对相邻果实造成的损坏。
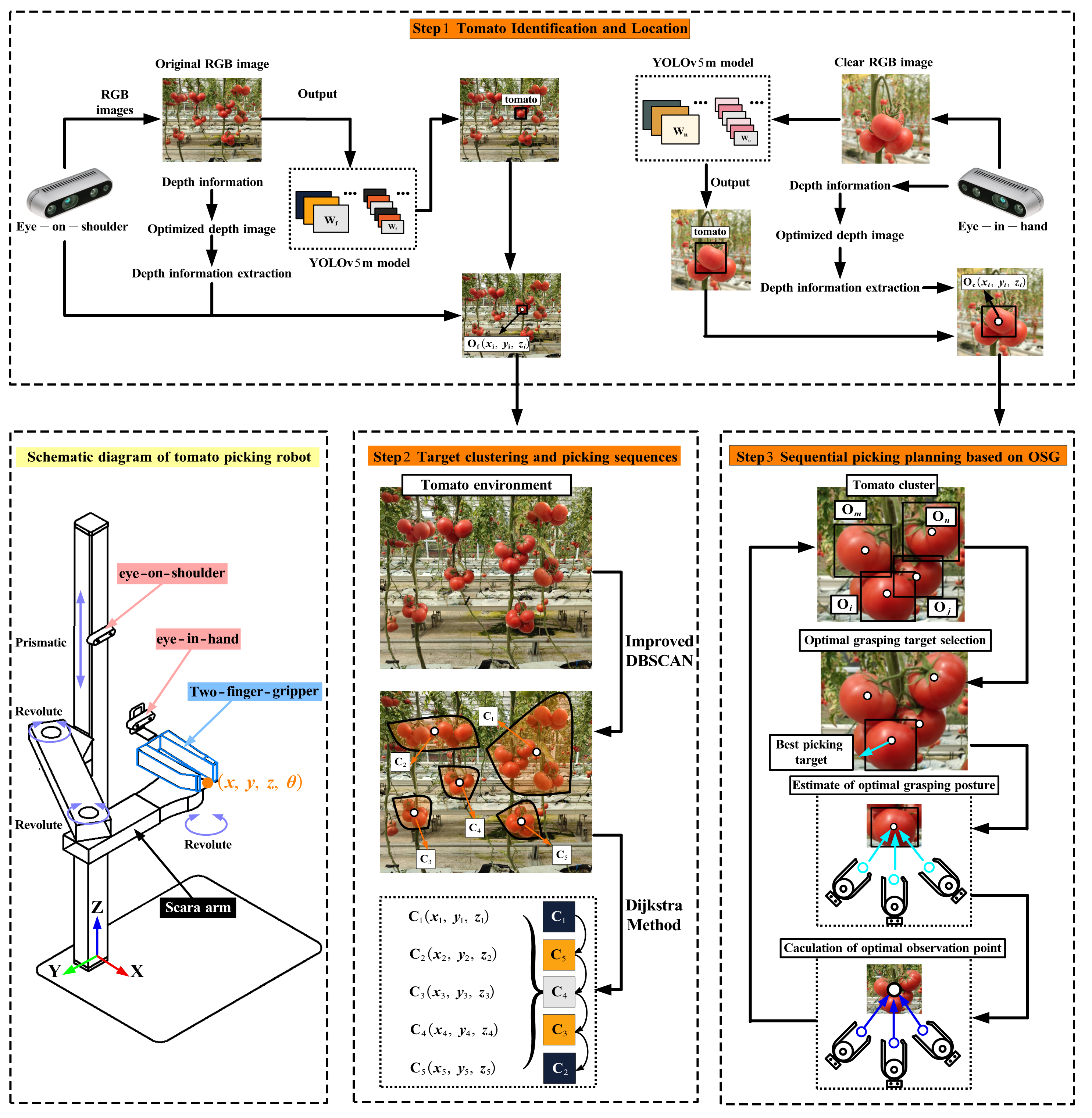
图1. 3msp2方法工作流程
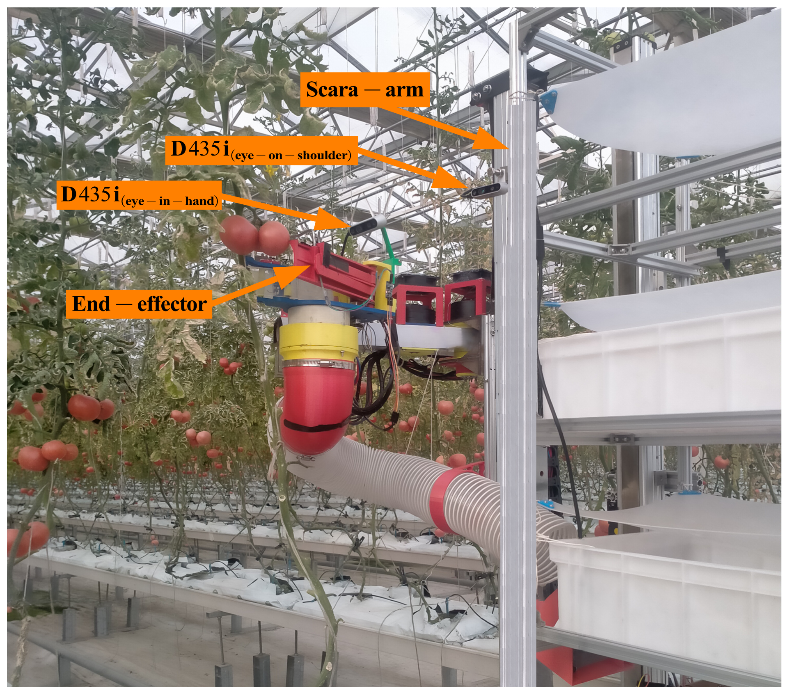
图2. 番茄采摘机器人试验平台
该研究得到了山东省重大科技创新工程项目、国家自然科学基金和山东省棉花产业技术体系的资助。
论文链接:
编 辑:万 千
审 核:贾 波

